
V dynamickom svete technického vzdelávania a inžinierstva, najmä v oblasti elektroniky, robotiky a mechatroniky, sa v bakalárskych prácach často stretávame s implementáciou rôznych senzorov, ktoré slúžia na zber dát z okolia. Tieto senzory predstavujú oči a uši digitálnych systémov, umožňujúc im vnímať a reagovať na zmeny vo fyzickom svete. Ich správny výber a efektívna integrácia sú kľúčové pre úspešnosť každého inžinierskeho projektu. Medzi širokou škálou dostupných senzorických technológií, ako sú infračervené senzory, tlakové senzory alebo teplotné senzory, si svoje pevné miesto vydobyl ultrazvukový senzor. Jedným z populárnych a užitočných senzorov je ultrazvukový senzor, ktorý je možné jednoducho integrovať s platformou Arduino. Táto otvorená hardvérová platforma je obľúbená vďaka svojej flexibilite, rozsiahlej komunite a jednoduchosti programovania, čo ju robí ideálnou voľbou pre študentov a hobbyistov.
Kombinácia ultrazvukového senzora s Arduinom otvára dvere k realizácii širokého spektra aplikácií a experimentov. Tento senzor nachádza široké uplatnenie v rôznych projektoch, od precízneho merania vzdialenosti s vysokou presnosťou v statickom aj dynamickom prostredí, cez efektívnu detekciu prekážok, ktorá je nevyhnutná pre autonómne systémy a robotické navigácie, až po zložitejšie interaktívne inštalácie, ktoré reagujú na prítomnosť alebo pohyb objektov. Jeho univerzálnosť, spoľahlivosť a cenová dostupnosť z neho robia ideálnu voľbu pre študentské projekty s obmedzeným rozpočtom a časovým harmonogramom, poskytujúc pritom dostatočnú presnosť a opakovateľnosť pre demonštračné, ale aj funkčné prototypy. V nasledujúcich sekciách sa podrobne pozrieme na princíp fungovania ultrazvukových senzorov, ich integráciu s Arduinom, programovanie a rôznorodé možnosti využitia, najmä s dôrazom na aplikácie v oblasti automobilovej techniky a robotiky.

Princíp Fungovania Ultrazvukového Senzora: Ako „Vidieť“ Zvukom
Na pochopenie efektívnej funkcionality a limitov ultrazvukového senzora je kľúčové porozumieť základom akustiky a mechanike šírenia zvukových vĺn. Ultrazvuk, ako už jeho názov napovedá, sú zvukové vlny s frekvenciou presahujúcou hornú hranicu počuteľnosti pre človeka, ktorá sa typicky pohybuje okolo 20 kHz. Bežné ultrazvukové senzory používané v hobby a študentských projektoch, ako je napríklad model HC-SR04, často pracujú v rozsahu od 25 kHz do 40 kHz. Táto vysoká frekvencia je zámerná, pretože umožňuje dosiahnuť vysokú presnosť merania vďaka krátkym vlnovým dĺžkam, ktoré sú schopné rozlíšiť menšie detaily a zároveň zabezpečiť, že ich prevádzka nebude rušiť ľudí ani väčšinu zvierat v okolí. Presne na tomto princípe, že Ultrazvukový senzor funguje na princípe vysielania a prijímania zvukových vĺn s vysokou frekvenciou, ktoré sú pre ľudské ucho nepočuteľné, stavia celá jeho efektívnosť a diskrétnosť v aplikáciách.
V srdci každého ultrazvukového senzora leží piezokeramický menič, ktorý je schopný transformovať elektrickú energiu na mechanické vibrácie, čo vedie k vysielaniu ultrazvukových vĺn. Naopak, prijaté mechanické vibrácie, teda ozvena, sú spätne transformované na elektrický signál. Cyklus merania sa začína impulzom. Senzor vyšle krátky ultrazvukový impulz, často v trvaní niekoľkých mikrosekúnd, ktorý sa šíri vzduchom. Tieto vlny sa pohybujú konštantnou rýchlosťou, až kým nenarazia na prekážku. Po náraze na objekt sa časť energie ultrazvukových vĺn odrazí späť k senzoru ako ozvena. Následne senzor počúva ozvenu, ktorá sa odrazí od objektu. Prijímacia časť senzora, ktorá môže byť buď rovnaký piezokeramický menič alebo samostatný prijímač, detekuje túto ozvenu a generuje elektrický signál.
Kľúčovou pre meranie vzdialenosti je čas. Elektronika senzora presne meria časový interval od momentu vyslania impulzu po moment detekcie prijatej ozveny. Doba, ktorá uplynie od vyslania impulzu po prijatie ozveny, je priamo úmerná vzdialenosti objektu od senzora. Je dôležité si uvedomiť, že ultrazvuková vlna musí precestovať vzdialenosť dvakrát - raz smerom k objektu a raz späť k senzoru. Preto pre výpočet skutočnej vzdialenosti je potrebné zohľadniť polovicu celkového nameraného času. Táto metóda je analógiou k tomu, ako netopiere alebo delfíny využívajú echolokáciu na orientáciu a lov v prostredí. Presnosť merania môže byť ovplyvnená faktormi ako teplota vzduchu, vlhkosť alebo prítomnosť silných prúdov vzduchu, ktoré môžu meniť rýchlosť šírenia zvuku. Pre väčšinu bežných aplikácií v bakalárskych prácach sú však tieto vplyvy zanedbateľné, alebo sa dajú korigovať kalibráciou.
Aplikácie Ultrazvukových Senzorov v Akademickom a Priemyselnom Prostredí
Flexibilita a spoľahlivosť ultrazvukových senzorov z nich robia ideálny nástroj pre širokú škálu výskumných a vývojových projektov v rámci študijných programov. V kontexte bakalárskej práce môže byť ultrazvukový senzor použitý na realizáciu viacerých funkcií, ktoré často tvoria základ inovatívnych riešení pre reálne problémy. Ich nasadenie nie je obmedzené len na laboratórne prostredie, ale vďaka svojej robustnosti sa uplatňujú aj v priemysle.
Jednou z najčastejších a praktických aplikácií je monitorovanie hladiny kvapalín alebo sypkých materiálov. Napríklad, môže byť súčasťou systému na monitorovanie hladiny kvapaliny v nádrži, kde senzor meria vzdialenosť od hladiny ku hornej hrane nádrže. Predstavte si, že potrebujete sledovať úroveň vody v zásobníkoch, paliva v automobilových nádržiach alebo zrná v sýpkach. Ultrazvukový senzor umiestnený nad hladinou dokáže bezkontaktne a s vysokou presnosťou určiť aktuálnu úroveň, čo eliminuje potrebu fyzického kontaktu s meraným médiom a zvyšuje bezpečnosť a hygienu. Tieto systémy môžu automaticky spúšťať alarmy pri dosiahnutí kritických hodnôt alebo aktivovať čerpadlá na doplnenie či odčerpanie tekutiny.
Okrem merania hladín je ultrazvukový senzor neoceniteľným nástrojom pre detekciu objektov a prekážok. Taktiež môže slúžiť na detekciu prítomnosti objektov v určitom priestore, čo je užitočné pri vývoji robotických aplikácií alebo bezpečnostných systémov. V oblasti robotiky sa senzory používajú pre autonómne navigačné systémy robotov, kde pomáhajú robotom orientovať sa v neznámom prostredí, vyhýbať sa kolíziám s prekážkami a mapovať si okolie. V kontexte automobilových aplikácií, čo je obzvlášť relevantné pre bakalárske práce zamerané na inteligentné vozidlá, sa ultrazvukové senzory používajú ako súčasť parkovacích asistentov, systémov detekcie mŕtveho uhla alebo pre preventívne brzdenie. Dokážu presne určiť vzdialenosť k iným vozidlám alebo statickým prekážkam, čím významne prispievajú k bezpečnosti a komfortu jazdy. V bezpečnostných systémoch môžu ultrazvukové senzory fungovať ako detektory pohybu, spúšťajúce alarm pri priblížení sa nežiaducej osoby k chránenému objektu alebo priestoru. Ich bezkontaktná povaha a schopnosť fungovať aj v tme ich robí atraktívnou alternatívou k infračerveným detektorom v niektorých scenároch.
Hardvérové Prepojenie Ultrazvukového Senzora s Arduinom: Krok za Krokom
Integrácia ultrazvukového senzora s platformou Arduino je jednou z najzákladnejších a najlepšie zdokumentovaných úloh v oblasti mikrokontrolérov. Pripojenie ultrazvukového senzora k doske Arduino je pomerne jednoduché a zvyčajne vyžaduje iba niekoľko prepojovacích vodičov, čo minimalizuje zložitosť hardvérovej implementácie a umožňuje študentom sústrediť sa viac na programovú logiku a aplikáciu. Pre väčšinu ultrazvukových senzorov, najmä pre všadeprítomný model HC-SR04, je konfigurácia pinov štandardizovaná a ľahko zapamätateľná.
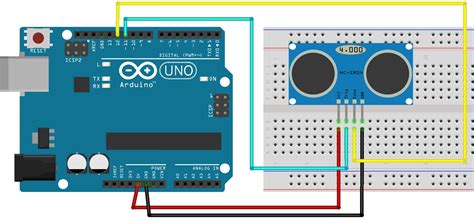
Väčšina ultrazvukových senzorov má štyri piny: VCC (napájanie), GND (zem), Trig (spúšťací pin) a Echo (ozvenový pin). Detailné vysvetlenie každého pinu je nasledovné:
VCC (Voltage Common Collector): Tento pin je určený pre napájanie senzora. Typicky vyžaduje 5V jednosmerné napätie, ktoré je štandardne dostupné na doskách Arduino. Pin VCC sa pripája k 5V výstupu na Arduine. Je dôležité zabezpečiť stabilné napájanie, aby sa predišlo chybám v meraní.
GND (Ground): Tento pin predstavuje referenčnú zem (Ground) pre elektronický obvod senzora. Pin GND sa pripája k GND (zem) na Arduine. Spoločné uzemnenie je nevyhnutné pre správnu komunikáciu medzi senzorom a mikrokontrolérom.
Trig (Trigger): Tento pin je vstupný pin, ktorým Arduino signalizuje senzoru, aby vyslal ultrazvukový impulz. Pin Trig sa pripája k digitálnemu pinu na Arduine, ktorý bude slúžiť na vysielanie spúšťacieho impulzu. Napríklad, môže byť pripojený k digitálnemu pinu 9 na doske Arduino. Krátky logický impulz (high) na tomto pine spustí vysielanie ultrazvuku.
Echo (Echo): Tento pin je výstupný pin zo senzora, ktorý indikuje príchod ozveny. Pin Echo sa pripája k inému digitálnemu pinu na Arduine, ktorý bude merať dobu trvania ozveny. Napríklad, môže byť pripojený k digitálnemu pinu 10 na doske Arduino. Senzor drží tento pin v stave HIGH po dobu, ktorá je priamo úmerná času, ktorý ultrazvuková vlna potrebuje na cestu tam a späť.
Po fyzickom prepojení, teda po správnom zapojení všetkých štyroch vodičov medzi senzorom a Arduinom, je potrebné naprogramovať Arduino tak, aby správne komunikovalo so senzorom. Toto zahŕňa definovanie a nastavenie Trig a Echo pinov ako vstupov alebo výstupov v závislosti od ich funkcie a následné čítanie hodnôt z Echo pinu. Trig pin bude nastavený ako výstup (OUTPUT), pretože Arduino naň bude posielať signál. Echo pin bude nastavený ako vstup (INPUT), pretože Arduino bude z neho prijímať signál. Dôležité je tiež správne načasovanie a sekvencia operácií v kóde, aby sa zabezpečilo presné a spoľahlivé meranie vzdialenosti.
Softvérová Implementácia a Meranie Vzdialenosti v Arduino IDE: Od Impulzu k Číslu
Softvérová časť je rovnako dôležitá ako hardvérové prepojenie. Pre úspešnú implementáciu ultrazvukového senzora v bakalárskej práci je nevyhnutné napísať príslušný kód v Arduino IDE (Integrated Development Environment). Toto vývojové prostredie poskytuje všetko potrebné na písanie, kompilovanie a nahrávanie kódu na dosku Arduino, čím zjednodušuje proces programovania aj pre začiatočníkov. Úlohou kódu je riadiť celú sekvenciu merania - od iniciácie vysielania ultrazvukového impulzu až po interpretáciu prijatej ozveny a prepočet na čitateľnú hodnotu vzdialenosti.
Tento kód bude zodpovedný za generovanie spúšťacieho impulzu pre senzor a meranie doby, počas ktorej je Echo pin aktívny. Proces sa začína vyslaním krátkeho, typicky 10 mikrosekundového, HIGH impulzu na Trig pin, čo je pokyn pre senzor, aby vyslal ultrazvukové vlny. Následne Arduino prepne Trig pin späť na LOW. Po vyslaní impulzu Arduino prechádza do režimu počúvania, kde čaká na signál z Echo pinu.
Kľúčovou funkciou v programovaní Arduina pre ultrazvukové senzory je pulseIn(). Základný princíp programovania spočíva v použití funkcie pulseIn(), ktorá umožní Arduinu merať dĺžku impulzu na danom pine. Táto funkcia je navrhnutá špeciálne pre meranie trvania impulzov a je veľmi užitočná pre tento typ aplikácií. Po vyslaní krátkeho impulzu na Trig pin, Arduino čaká na prijatie impulzu na Echo pin. Funkcia pulseIn(echoPin, HIGH) sa spustí a bude merať čas, počas ktorého je Echo pin v stave HIGH. Akonáhle Echo pin prejde zo stavu LOW do HIGH a potom späť do LOW, funkcia pulseIn() vráti dĺžku tohto impulzu v mikrosekundách. Dĺžka tohto impulzu je priamo úmerná dobe letu ultrazvukovej vlny.
Po získaní časového údaja je potrebné túto dobu prekonvertovať na fyzickú vzdialenosť. Táto doba sa potom prekonvertuje na vzdialenosť. Pre výpočet vzdialenosti sa používa vzorec, ktorý zohľadňuje rýchlosť zvuku vo vzduchu. Táto rýchlosť nie je konštantná a mierne sa mení s teplotou, vlhkosťou a tlakom. Pri štandardných podmienkach (približne 20°C) je rýchlosť zvuku vo vzduchu približne 343 metrov za sekundu, čo je ekvivalent 0,0343 centimetrov za mikrosekundu. Keďže meraná doba je dvojnásobná (cesta tam a späť), ultrazvuková vlna musí precestovať vzdialenosť k objektu a späť k senzoru. Preto vzorec pre vzdialenosť v centimetroch je: vzdialenosť = (čas * rýchlosť_zvuku) / 2.V praxi to znamená, že nameraný čas (v mikrosekundách) sa vynásobí rýchlosťou zvuku v cm/µs (približne 0.0343 cm/µs) a výsledok sa vydelí dvoma. Takto získaná hodnota reprezentuje vzdialenosť objektu od senzora v centimetroch. Je dôležité zvážiť aj limity senzora, ako je maximálny a minimálny dosah, a zahrnúť do kódu ošetrenie pre prípad, keď ozvena nie je detekovaná (napr. objekt je príliš ďaleko alebo mimo zorného uhla senzora).
Ultrazvukové meranie vzdialenosti pomocou Arduina | Projekt Arduino
// Príklad základného kódu pre ultrazvukový senzor HC-SR04 s Arduinom// (Len pre ilustráciu, nie na priame kopírovanie bez overenia)const int trigPin = 9; // Pin pre vysielanie impulzu (Trig)const int echoPin = 10; // Pin pre príjem ozveny (Echo)long duration; // Premenná pre uloženie doby letu zvukuint distanceCm; // Premenná pre uloženie vypočítanej vzdialenosti v cmvoid setup() { pinMode(trigPin, OUTPUT); // Trig pin ako výstup pinMode(echoPin, INPUT); // Echo pin ako vstup Serial.begin(9600); // Inicializácia sériovej komunikácie pre výstup dát}void loop() { // Vyčistenie Trig pinu - zabezpečenie nízkeho stavu pre vyslanie nového impulzu digitalWrite(trigPin, LOW); delayMicroseconds(2); // Vyslanie 10µs HIGH impulzu na Trig pin pre spustenie senzora digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); // Meranie doby, počas ktorej je Echo pin HIGH (doba letu zvuku) duration = pulseIn(echoPin, HIGH); // Výpočet vzdialenosti // Rýchlosť zvuku vo vzduchu je približne 343 metrov za sekundu (0.0343 cm/µs) // Vzdialenosť = (čas * rýchlosť zvuku) / 2 (pretože zvuk prešiel tam a späť) distanceCm = duration * 0.0343 / 2; // Zobrazenie vzdialenosti na sériovom monitore Serial.print("Vzdialenost: "); Serial.print(distanceCm); Serial.println(" cm"); delay(100); // Malá pauza pred ďalším meraním}Vyššie uvedený kód predstavuje základnú štruktúru pre komunikáciu s ultrazvukovým senzorom. Kód najprv definuje, ktoré digitálne piny Arduina budú použité pre Trig a Echo. V setup() funkcii sa piny inicializujú na správne režimy (výstup pre Trig, vstup pre Echo) a spustí sa sériová komunikácia pre zobrazenie výsledkov. V loop() funkcii sa neustále opakuje cyklus merania: vyslanie krátkeho impulzu, meranie doby ozveny pomocou pulseIn() a prepočet na vzdialenosť s použitím známej rýchlosti zvuku. Následne sa vypočítaná vzdialenosť odošle na sériový monitor, čo umožňuje monitorovanie hodnôt v reálnom čase.
Rozmanité Scenáre Využitia Ultrazvukového Senzora v Projektových Prácach: Inovácie a Praktické Riešenia
Vďaka svojej jednoduchosti, presnosti a efektívnosti sa ultrazvukový senzor stal neoddeliteľnou súčasťou mnohých inovatívnych projektov, najmä v akademickom prostredí. Ultrazvukový senzor je mimoriadne flexibilný a môže byť použitý v širokej škále bakalárskych prác, čo študentom umožňuje experimentovať s rôznymi aplikáciami a rozvíjať svoje inžinierske zručnosti. Jeho adaptabilita umožňuje riešiť komplexné problémy v rôznych doménach od robotiky až po inteligentné domácnosti.
Niektoré z možných aplikácií zahŕňajú široké spektrum využití, od autonómnych systémov až po interaktívne inštalácie:
- Robotika: V tejto oblasti je ultrazvukový senzor kľúčovým komponentom pre percepciu prostredia. Jeho primárnym cieľom je umožniť vývoj autonómneho robota, ktorý dokáže detekovať a vyhýbať sa prekážkam. To je obzvlášť dôležité pre mobilné roboty, ako sú doručovacie roboty, servisné roboty alebo prieskumné vozidlá. V kontexte automobilových aplikácií, ako sú autonómne vozidlá alebo asistované jazdné systémy, ultrazvukové senzory slúžia na monitorovanie bezprostredného okolia vozidla, identifikáciu prekážok pri nízkych rýchlostiach, detekciu obrubníkov alebo iných pevných objektov, ktoré by mohli spôsobiť poškodenie.
- Meranie hladiny: Bezkontaktná povaha ultrazvukových senzorov ich robí ideálnymi pre meranie hladín. Táto aplikácia zahŕňa konštrukciu systému na monitorovanie hladiny kvapalín alebo sypkých materiálov v nádobách. Môže ísť o monitorovanie vody v zásobníkoch, paliva v nádržiach, zrná v silách, alebo dokonca krmiva pre zvieratá. Systémy postavené na tejto technológii môžu automaticky spúšťať doplnenie alebo vyprázdnenie nádob, čím zvyšujú efektivitu a znižujú potrebu manuálnych kontrol.
- Parkovacie asistenty: Jedna z najznámejších a najrozšírenejších aplikácií v automobilovom priemysle. Vytvorenie zariadenia, ktoré pomáha pri parkovaní meraním vzdialenosti od prekážok. Tieto systémy poskytujú vodičovi vizuálnu alebo zvukovú spätnú väzbu o vzdialenosti k prekážkam, ako sú iné autá, steny alebo stĺpy. V bakalárskej práci je možné vyvinúť prototyp inteligentného parkovacieho asistenta pre model "Arduino auta", ktorý by dokázal presne informovať o dostupnom priestore a minimalizovať riziko kolízie.
- Bezpečnostné systémy: Ultrazvukové senzory môžu výrazne prispieť k zabezpečeniu priestorov. Ich využitie spočíva v implementácii detektora pohybu alebo alarmu, ktorý reaguje na priblíženie sa k senzoru. Na rozdiel od infračervených senzorov, ultrazvukové senzory detekujú pohyb na základe narušenia šírenia zvukových vĺn, čo ich robí odolnými voči zmenám teploty a svetelným podmienkam. Môžu byť použité na zabezpečenie dverí, okien, alebo celých miestností.
- Interaktívne inštalácie: V oblasti umenia, vzdelávania a zábavy otvárajú ultrazvukové senzory nové možnosti. Umožňujú vytvorenie umeleckých alebo vzdelávacích inštalácií, ktoré reagujú na prítomnosť osôb. Napríklad, môžu meniť svetlá, zvuk alebo spúšťať animácie, keď sa k nim priblíži návštevník. To poskytuje jedinečné a pohlcujúce zážitky, ktoré sú obzvlášť cenné v múzeách, galériách alebo interaktívnych výstavách.
Výber a Optimalizácia Ultrazvukového Senzora pre Špecifické Požiadavky: Kľúč k Úspechu Projektu
Úspešnosť projektu, v ktorom je nasadený ultrazvukový senzor, často závisí nielen od správnej implementácie, ale aj od počiatočného výberu vhodného senzora pre konkrétnu aplikáciu. Pri výbere ultrazvukového senzora je dôležité zvážiť jeho dosah, presnosť a odolnosť voči podmienkam prostredia, v ktorom bude pracovať. Tieto parametre sú kritické pre zabezpečenie spoľahlivého a opakovateľného výkonu.
Dosah senzora určuje maximálnu a minimálnu vzdialenosť, ktorú je senzor schopný spoľahlivo zmerať. Pre parkovacieho asistenta v aute môže byť dostatočný dosah do 2-3 metrov, zatiaľ čo pre monitorovanie hladiny vo veľkej nádrži môže byť potrebný senzor s dosahom 5 metrov alebo viac. Modely ako HC-SR04 majú zvyčajne dosah od 2 cm do 400 cm.
Presnosť senzora udáva, ako blízko sa nameraná hodnota blíži k skutočnej vzdialenosti. Faktory ako rozlíšenie senzora, vplyv teploty na rýchlosť zvuku a algoritmus spracovania signálu môžu ovplyvniť presnosť. Pre niektoré aplikácie, ako je navigácia autonómneho vozidla, je potrebná vysoká presnosť, zatiaľ čo pre jednoduchú detekciu prekážok môže byť tolerancia väčšia.
Odolnosť voči podmienkam prostredia je kľúčová, ak má byť senzor použitý v náročných podmienkach. Ak má byť senzor použitý vonku, v prostredí s vysokou vlhkosťou, prachom alebo vo vode, je nevyhnutné zvoliť vodotesné alebo priemyselné ultrazvukové senzory. Štandardný HC-SR04 je určený pre vnútorné použitie a nie je odolný voči vode ani prachu. V takýchto prípadoch sa uplatňujú robustnejšie alternatívy ako JSN-SR04T, ktoré majú zatavený menič.
Populárne modely ako HC-SR04 sú cenovo dostupné a vhodné pre väčšinu študentských projektov. Ich nízka cena a široká dostupnosť ich robia ideálnymi pre rýchle prototypovanie a vzdelávacie účely. Avšak pre náročnejšie aplikácie, kde je vyžadovaná vyššia presnosť, dlhší dosah alebo odolnosť voči špecifickým podmienkam, je potrebné zvážiť drahšie a špecializovanejšie senzory. Napríklad, senzory s menšou uhlom snímania môžu byť lepšie pre presné bodové merania, zatiaľ čo senzory s väčším uhlom sú vhodné pre širšiu detekciu. Pri výbere by sa mala zohľadniť aj frekvencia vysielaného ultrazvuku, ktorá ovplyvňuje tak rozlíšenie, ako aj dosah a prienik cez rôzne materiály.
Význam Integrácie Arduina a Ultrazvukových Senzorov vo Vzdelávaní a Praxi: Rozvoj Inžinierskych Zručností
Integrácia ultrazvukového senzora s Arduinom predstavuje pre študentov oveľa viac než len technickú úlohu. Poskytuje študentom cenné skúsenosti s hardvérovou aj softvérovou stránkou projektovania, čo je neoceniteľné pre ich budúcu kariéru v technických odboroch. Tento typ projektu umožňuje študentom prepojiť teoretické vedomosti získané z prednášok s praktickou aplikáciou, čím si prehlbujú svoje chápanie základných princípov elektroniky, programovania a systémového inžinierstva.
Práca s ultrazvukovými senzormi a Arduinom rozvíja kľúčové inžinierske zručnosti. Na hardvérovej úrovni sa študenti učia správne zapájať elektronické komponenty, rozumieť datasheetom a princípom elektrických obvodov. Získavajú praktické skúsenosti s prácou s rôznymi napätiami, prúdmi a signálmi, čo je základ pre návrh a implementáciu komplexnejších elektronických systémov. Na softvérovej úrovni si študenti osvojujú princípy programovania mikrokontrolérov v prostredí Arduino IDE. Učia sa písať čistý a efektívny kód, pracovať s digitálnymi vstupmi a výstupmi, používať časové oneskorenia a algoritmy pre spracovanie dát zo senzorov. Konkrétne pri ultrazvukovom senzore sa zdokonaľujú v práci s meraním časových intervalov a prepočtom fyzikálnych veličín.
Okrem technických zručností, takéto projekty podporujú aj rozvoj dôležitých mäkkých zručností. Študenti sa učia riešiť problémy, keďže sa stretávajú s výzvami ako je šum v meraní, chyby v kóde alebo neočakávané správanie hardvéru. Musia kriticky myslieť, analyzovať príčiny problémov a navrhovať efektívne riešenia. Taktiež si osvojujú interdisciplinárne myslenie, keďže musia integrovať poznatky z fyziky (akustika, rýchlosť zvuku), matematiky (výpočet vzdialenosti), elektroniky a programovania.
V kontexte bakalárskej práce je to ideálna príležitosť na prezentáciu schopnosti študenta navrhnúť, implementovať a otestovať funkčný systém. Získané skúsenosti s návrhom, realizáciou a ladením projektu, ako napríklad "Arduino auto" s ultrazvukovými senzormi pre autonómnu navigáciu alebo parkovacieho asistenta, sú priamo prenosné do priemyselnej praxe. Absolventi s takýmito praktickými skúsenosťami sú potom lepšie pripravení na vstup do profesijného života, kde sa očakáva schopnosť pracovať s modernými technológiami a riešiť reálne inžinierske výzvy. Vďaka týmto praktickým skúsenostiam sú študenti schopní nielen teoreticky rozumieť konceptom, ale aj ich efektívne aplikovať v praxi.
tags: #diplomova #praca #bakalarska #arduino #auto #ultrazvuk